Tree Based Methods in Machine Learning - Gradient Boosting and XGBoost
Gradient Boosting
In a general supervised machine learning setting, we often want to find an estimate $F(\mathbf{x})$, that produces a value $y^*$ as the prediction to the ground truth $y$. To find the optimal $F$, we find the function that minimizes the expected value of some pre-determined loss function.
$$ F^* = \underset{F}{\operatorname{argmin}} \ E_{Y | x}[L(y, F(\mathbf{x}))] \tag{14} $$
Instead of looking at all possible functions, we usually narrow our function space down to a family of parameterized functions $F(\mathbf{x}; \mathbf{P})$ where $\mathbf{P}$ is a set of parameters that defines the model.
Now, the problems reduces to finding the parameters, $\mathbf{P^*}$, that minimizes the expected loss.
$$\begin{aligned} \mathbf{P^*} &= \underset{\mathbf{P}}{\operatorname{argmin}} \ E_{Y | x}[L(y, F(\mathbf{x}; \mathbf{P}))] \\\ &= \underset{\mathbf{P}}{\operatorname{argmin}} \ \mathbf{\Phi(\mathbf{P})} \end{aligned}$$
And we denote our estimated function as $F^* = F(\mathbf{x};\mathbf{P^*})$
Numerical Optimization on Additive Models
Now, we restrict our attention to additive models. We define our additive model as following:
$$ F(\mathbf{x}; { \ \beta_m, \mathbf{a}_m \ }_{m=1}^M) = \sum \limits_{m=1}^{M} \beta_m h(\mathbf{x}; \mathbf{a}_m) \tag{15} $$
So, the $\mathbf{P}$ corresponds to the parameter set $\{ \ \beta_m, \mathbf{a}_m \ \}_{m=1}^M$ and $h(\mathbf{x}; \mathbf{a})$ is a simple model obtained by a weak learner. We will be using small regression trees as our weak learners. In that case, the parameters, $\mathbf{a}_m$, corresponds to split variables, split points and predictions at leaf (mean, median, etc. for regression trees). And the parameter $\beta_m$ is the weight of the weak learner.
If we make an analogy to gradient descent, in which we make an update with a function's steepest direction to find the point where it is minimum:
$$x \gets x - \alpha * f^ \prime (x)$$
where $\alpha$ is the learning rate.
Or if we want to find the parameters of a function where it attains its minimum value, we make updates using a cost function $J(\mathbf{\theta})$:
$$\theta_i \gets \theta_i - \alpha \frac{\partial J(\mathbf{\theta})}{\partial \theta_i}$$
With the same logic, in Gradient Boosting, we make updates to our additive model:
$$F_{m}(\mathbf{x}) = F_{m-1}(\mathbf{x}) + F_m(\mathbf{x})$$
where $f_m(\mathbf{x}) = -\rho_m g_m(\mathbf{x})$ and
$$g_m(\mathbf{x}) = \left[ \frac{\partial E_y[L(y, F(\mathbf{x}) | \mathbf{x}]}{\partial F(\mathbf{x})} \right]_{F(\mathbf{x}) = F_{m-1}(\mathbf{x})}$$
and the final solution will be:
$$F^*(\mathbf{x}) = \sum \limits_{m=0}^{M} f_m(\mathbf{x})$$
where $f_0(x)$ is the initial guess.
We also find the optimum $\rho_m$ as:
$$\rho_m = \underset{\rho}{\operatorname{argmin}} \ E_{y, \mathbf{x}} L(y, F_{m-1}(\mathbf{x}) - \rho g_m(\mathbf{x}))$$
Training
This method cannot be directly applied when we have limited data because we cannot calculate the expected loss directly. In this case, we make use of the training set that we have.
We will use the parameterized additive model in (15) and minimize expected loss estimated from the training set:
$$ { \ \beta_m, \mathbf{a}_m \ } = \underset{\beta^\prime_m, \mathbf{a}^\prime_m}{\operatorname{argmin}} \ \sum \limits_{i=1}^{N} L \left( y_i, \sum \limits_{m=0}^{M} \beta^\prime_m h(\mathbf{x}_i; \mathbf{a}^\prime_m) \right) $$
It's often hard to find all the parameters at one step. Instead of this, we use an iterative approach.
$$ { \ \beta_m, \mathbf{a}_m \ } = \underset{\beta^\prime_m, \mathbf{a}^\prime_m}{\operatorname{argmin}} \ \sum \limits_{i=1}^{N} L \left( y_i, F_{m-1}(\mathbf{x}_i) + \beta^\prime_m h(\mathbf{x}_i; \mathbf{a}^\prime_m) \right) $$
then we make update:
$$ F_m(\mathbf{x}) = F_{m-1}(\mathbf{x}) + \beta_m h(\mathbf{x}; \mathbf{a}_m) $$
If you recall, this is the Forward Stagewise Additive Modelling technique that we talked about in the previous section.
In the case where we have finite data, $g_m$, the gradients are calculated for the training data instances $\{ \mathbf{x}_i \}_{i=1}^N$:
$$ g_m(\mathbf{x}_i) = \left[ \frac{\partial L(y, F(\mathbf{x}_i) }{\partial F(\mathbf{x}_i)} \right]_{F(\mathbf{x}) = F_{m-1}(\mathbf{x})} $$
But we cannot calculate the gradients directly for new data points other than the ones in the training set. And even if for training set, if we use the gradients directly, the model would not be well generalized. Therefore, we need our model to learn a mapping from training data points to gradients in order to generalize to unseen data. To do that, we use a parameterized function and that is the $h(\mathbf{x}; \mathbf{a})$, as we mentioned, and learn its parameters, $\mathbf{a}$, as given below:
$$ { \ \mathbf{a}_m \ } = \underset{\mathbf{a}} {\operatorname{argmin}} \ \sum \limits_{i=1}^N (-g_m(\mathbf{x}_i) - \beta h(\mathbf{x}_i; \mathbf{a} )) \tag{16} $$
So, we fit the negative gradients, $-g_m$, to the parameterized model $h(\mathbf{x}; \mathbf{a})$ to learn a mapping from the obversations to its gradients. Negative gradients are also called "pseudo-responses", in the sense that, we try to learn a mapping to them even though they are not the real response values. And they are also called "pseudo-residuals" as well.
Therefore, we have a general algorithm that we will work for any differentible loss function. At each stage of the algorithm we learn a mapping from data points to gradients. This is analogous to the standard applications of gradient descent in machine learning where the parameters of a function is learned.

Applications of Gradient Boosting
Let us derive some algorithms for common tasks such as regression and classification using the Gradient Boosting methodology that is presented in the previous section.
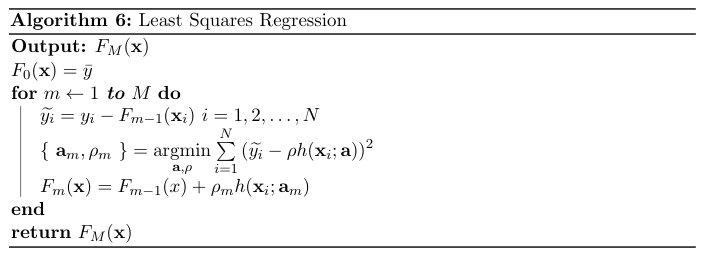
Least Squares Regression
We define the loss function for least squares regression as $L(y, F) = \frac{(y-F)^2}{2}$, the squared error. Pseudo-responses are derivative of this loss function. So, $\widetilde{y}$ is simply $y - F$. Our initials guess will be $F_0(\mathbf{x}) = \bar{y}$, namely the mean of the target values, because squared error is minimized at the mean. With these, we can build our least squares regression with Gradient Boosting algorithm.
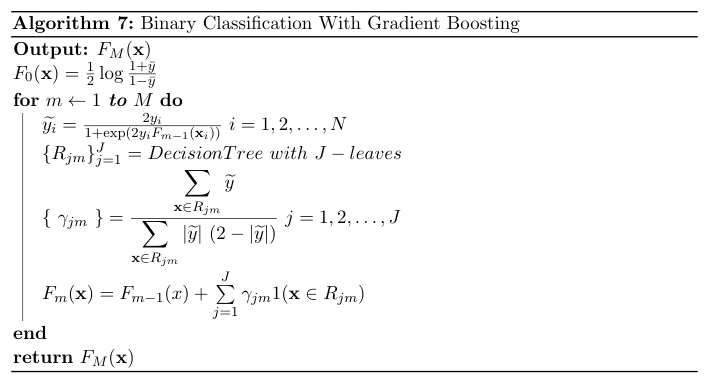
Binary Classification
In the case of binary classification, we have negative binomial log-likelihood as the loss function:
$$ L(y, F) = - (y \log p + (1-y) \log (1-p)) $$
where $y \in { -1, 1 }$. $p$ is related to $F$ through:
$$p(y = 1 | \mathbf{x}) = \frac{1}{1 + e^{-F(\mathbf{x})}}$$
Pulling out $F$ from this equation, we find:
$$F(\mathbf{x}) = \frac{1}{2} \log \left[ \frac{P(y = 1 | \mathbf{x})}{P(y = -1 | \mathbf{x})} \right]$$
With some algebraic manipulation, we can write the same loss function using only $y$ and $F$:
$$L(y, F) = \log( 1 + \exp(-2yF) )$$
Taking derivative with respect to $F$, we find the pseudo-response:
$$\widetilde{y_i} = - \left[ \frac{\partial{L(y_i, F(\mathbf{x}_i))}}{F(\mathbf{x}_i)} \right]_{F(\mathbf{x}) = F_{m-1}(\mathbf{x}_i)} = \frac{2y_i}{1 + \exp(2y_iF_{m-1}(\mathbf{x}_i))} \tag{17}$$
where $i = 1, 2, \dots, N$
We will use regression trees as our base learners to learn a mapping to these pseudo-responses. After building the regression tree, predictions in the leaves, $R_{jm}$, is the solution of this objectve:
$$\gamma_{jm} = \underset{\gamma} {\operatorname{argmin}} \sum \limits_{ \mathbf{x} \in R_{jm} } \log \left( 1 + \exp(-2y_i(F_{m-1}(\mathbf{x}) + \gamma)) \right) \tag{18}$$
We can't directly solve this equation. Instead, we will estimate it with a single Newton-Raphson step. For that, we need to find the first and second derivative of:
$$H(\gamma; R_{jm}) = \sum \limits_{ \mathbf{x} \in R_{jm} } \log \left( 1 + \exp(-2y_i(F_{m-1}(\mathbf{x}) + \gamma) \right)) \tag{19}$$
1-step Newton-Raphson approximation of gamma with initial value 0 is:
$$\begin{aligned} \gamma &= \gamma_0 - \frac{H^\prime(\gamma_0)}{H^{\prime\prime}(\gamma_0)} \\\ &= 0 - \frac{H^\prime(0)}{H^{\prime\prime}(0)} \\\ &= - \frac{H^\prime(0)}{H^{\prime\prime}(0)} \end{aligned}$$
First derivative of $H$ is:
$$H^\prime(\gamma) = \sum \limits_{ \mathbf{x} \in R_{jm} } \frac{-2y_i}{1 + \exp(2y_i(F_{m-1}(\mathbf{x}_i) + \gamma))} \tag{20}$$
And at $\gamma = 0$:
$$\begin{aligned} H^\prime(0) &= \sum \limits_{ \mathbf{x} \in R_{jm} } \frac{-2y_i}{1 + \exp(2y_iF_{m-1}(\mathbf{x}_i))} \end{aligned}$$
We can see this equation is equal to negative of $\widetilde{y}$ (see equation (17)). So:
$$H^\prime(\gamma) = -\sum \limits_{ \mathbf{x} \in R_{jm} } \widetilde{y_i} \tag{21}$$
Second derivative of $H$ can be found by taking derivative of (19) with respect to $\gamma$ again:
$$\begin{aligned}
H^{\prime\prime}(\gamma) &= \sum \limits_{ \mathbf{x} \in R_{jm} } \frac{d}{d\gamma} H^\prime(\gamma) \\\
&= \sum \limits_{ \mathbf{x} \in R_{jm} } \frac{
(-2y_i) 2y_i \exp({2y_iF_{m-1}(\mathbf{x})})
}{
\left( 1 + \exp({ 2y_i (F_{m-1}(\mathbf{x}) + \gamma) }) \right)^2
} \\\
&= \sum \limits_{ \mathbf{x} \in R_{jm} } - \widetilde{y} \ . \ \widetilde{y} \ . \ exp(2y_iF_{m-1}(\mathbf{x})) \\\
&= \sum \limits_{ \mathbf{x} \in R_{jm} } - \widetilde{y} \ . \ \widetilde{y} \ . \ \frac{(2y - \widetilde{y})}{\widetilde{y}} \\\
&= \sum \limits_{ \mathbf{x} \in R_{jm} } \widetilde{y} (\widetilde{y} - 2y)
\end{aligned}$$
We can simplify this a little bit further. We can see that, from the equation (17), $y$ and $\widetilde{y}$ always has the same sign. So, the product $y \ . \ \widetilde{y}$ equals to $| \widetilde{y} |$.
Therefore, the second derivative equals to:
$$H^{\prime\prime}(\gamma) = \sum \limits_{ \mathbf{x} \in R_{jm} } |\widetilde{y}| \ (|\widetilde{y}| - 2) \tag{22}$$
Being calculated the first and second derivatives, we can find our 1-step Newton-Raphson approximation of $\gamma$:
$$\begin{aligned} \gamma_{jm} &= - \frac{H^\prime(0)}{H^{\prime\prime}(0)} \\\ &= -\frac{ \displaystyle{ \sum \limits_{ \mathbf{x} \in R_{jm} } \widetilde{y} } } { \displaystyle{ \sum \limits_{ \mathbf{x} \in R_{jm} } |\widetilde{y}| \ (|\widetilde{y}| - 2) } } \\\ \end{aligned} $$
$$ \gamma_{jm} = \frac{ \displaystyle{ \sum \limits_{ \mathbf{x} \in R_{jm} } \widetilde{y} } } { \displaystyle{ \sum \limits_{ \mathbf{x} \in R_{jm} } |\widetilde{y}| \ (2 - |\widetilde{y}|) } } \tag{23} $$
By using (23), we can label the leaves of the decision tree that was built in mth iteration.
Finally, we must derive an initial prediction, $F_0(\mathbf{x})$. One can easily show that the negative binomial log-likelihood is minimized at:
$$F_0(\mathbf{x}) = \frac{1}{2} \log \left(\frac{ \displaystyle{ \sum \limits_{i=1}^N 1(y_i=1) } }{ \displaystyle{ \sum \limits_{i=1}^N 1(y_i=-1) } } \right) \tag{24}$$
Notice that we used $\frac{1}{N} \sum \limits_{i=1}^N 1(y_i=1)$ as an estimate for $P(y = 1 | \mathbf{x})$. Similarly $\frac{1}{N} \sum \limits_{i=1}^N 1(y_i=-1)$ is an estimate for $P(y = -1 | \mathbf{x})$. By using these estimates, we came up with (24).
Note that the $F_0$ is refers to a constant value that minimizes cost
Equation above becames a lot clear if we used $\bar{y} = \frac{1}{N} \sum \limits_{i=1}^N y_i$:
$$F_0(\mathbf{x}) = \frac{1}{2} \log \frac{1+\bar{y}}{1-\bar{y}} \tag{25}$$
Following the same logic, any learning task with any differentiable loss function $L$ and base learner $h$, can be done with Gradient Boosting algorithm presented in Algorithm 5.
Regularization
Usually, we don't want our learning algorithm to "overlearn" our training set. Instead, we want them to generalize and have high performance on unseen data as well as training data. If a learning algorithm performs almost perfect on training data but perform poorly on a separate validation set, then that algorithm is said to be overfit. There are techniques to overcome this problem of overfitting. They are called regularization techniques. Regularization techniques differs from algorithm to algorithm.
For example, in gradient descent, we regularize our model by tuning the learning rate parameter or number of iterations. Learning rate is the shrinkage parameter applied on the gradients of the cost function.
In Gradient Boosting, we train $M$ base learner to learn a mapping to gradients. Then update our model with these gradients. So, one natural regularization technique is tuning the $M$ parameter. Other one is bringing a new learning rate parameter $\nu$, to the model. We can modify our model update equation with this learning rate parameter as the following:
$F_m(\mathbf{x}) = F_{m-1}(x) + \nu \ . \ \rho_m h(\mathbf{x}_i; \mathbf{a}_m)$
By using a learning rate, we reduce the influence of a single base learner to leave some room for other base learners to improve the model.
There are other effective regularization techniques that are used by popular Gradient Boosting libraries such as XGBoost, LightGBM, Catboost, etc. Popular ones includes maximum features to use at each iteration (this is similar to Random Forest), subsampling the training set at each iteration and maximum depth of each tree, etc.
In the next section, we will discuss these popular algorithms that uses the Gradient Boosting concept.
XGBoost
In recent years, several Gradient Boosting algorithms have been developed. With these algorithms, Gradient Boosting became much more scalable and computationally efficient. In Gradient Boosted Decision Trees, most computationally expensive part is the tree building process. For each non-terminal node, a split criterion must be found by looking at all possible splits of each feature. This process is really slows down the training of Gradient Boosted Decision Trees. If we have lots of features and lots of data, even one step of Gradient Boosting takes an unreasonable amount of time. Recently developed algorithms address this problem and gives efficient solutions.
One popular Gradient Boosting franework is XGBoost. It was initially developed in 2014. It uses a modified cost function that has an additional regularization term which penalizes the complexity of the trees. Besides that, it addresses computational problems that arise when using Gradient Boosting in large data sets by proposing several solutions.
Regularized Cost Function
As we seen on the previous chapter, given a loss function, $L$, we define our objective (cost function) as:
$$\sum \limits_{i=1}^N L(y_i, F_{m}(\mathbf{x}_i))$$
XGBoost proposes a modified version of this objective that takes regularization into account:
$$\mathcal{L} = \sum \limits_{i=1}^N L(y_i, F_{M}(\mathbf{x}_i)) + \sum \limits_{k = 1}^M \Omega (f_k) \tag{26}$$
where $\Omega(f) = \displaystyle{\gamma T + \frac{1}{2} \lambda \sum \limits_{j=1}^T {w_j}^2}$. $T$ is the number of leaves in the tree $f$ and $w_j$ is the score in jth leaf. $\gamma$ and $\lambda$ are regularization parameters.
This objective minimizes the loss of the final model $F_M$ with $M$ trees. However, in practice, it's impossible to find $M$ trees in only one step. We need a greedy approach that adds the trees in an iterative fashion. So, at iteration m, we need to solve the objective:
$$\mathcal{L}^{(m)} = \sum \limits_{i=1}^N L(y_i, F_{m-1}(\mathbf{x}_i) + f_m(\mathbf{x}_i)) + \Omega (f_m) \tag{27}$$
Assuming that $L$ is a twice differentiable function, we approximate the $L$ function by second order Taylor polynomial.
$$\mathcal{L}^{(m)} = \sum \limits_{i=1}^N \left[ L(y_i, F_{m-1}(\mathbf{x}_i)) + g(\mathbf{x}_i)f_m(\mathbf{x}_i) + \frac{1}{2} h(\mathbf{x}_i)f_m^2(\mathbf{x}_i) \right] + \Omega (f_m) \tag{28}$$
where $$g(\mathbf{x}) = \frac{ \partial L(y_i, F_{m-1}(\mathbf{x})) }{ \partial F_{m-1}(\mathbf{x}) }$$ and
$$h(\mathbf{x}) = \frac{ \partial {L(y_i, F_{m-1}(\mathbf{x}))}^2 }{ \partial^2 F_{m-1}(\mathbf{x}) }$$
This equation can be simplified by removing the constant terms.
$$\mathcal{\tilde{L}}^{(m)} = \sum \limits_{i=1}^N \left[ g(\mathbf{x}_i)f_m(\mathbf{x}_i) + \frac{1}{2} h(\mathbf{x}_i)f_m^2(\mathbf{x}_i) \right] + \Omega (f_m)$$
$$\mathcal{\tilde{L}}^{(m)} = \sum \limits_{i=1}^N \left[ g(\mathbf{x}_i)f_m(\mathbf{x}_i) + \frac{1}{2} h(\mathbf{x}_i)f_m^2(\mathbf{x}_i) \right] + \gamma T + \frac{1}{2} \lambda \sum \limits_{j=1}^T {w_j}^2$$
To simplify this equation further, we can group the summations to be based on the points in the same leaf. Recall that we can define the $f_m$ as:
$$f_m(\mathbf{x}) = \sum \limits_{j=1}^T w_j 1(\mathbf{x} \in R_j)$$
Using that definition of $f_t$, we can simplify our objective:
$$\begin{aligned} \mathcal{\tilde{L}}^{(m)} &= \sum \limits_{j=1}^T \left[ \sum \limits_{\mathbf{x}_i \in R_j} g(\mathbf{x}_i)w_j + \frac{1}{2}\sum \limits_{\mathbf{x}_i \in R_j} h(\mathbf{x}_i)w_j^2 \right] + \gamma T + \frac{1}{2} \lambda \sum \limits_{j=1}^T {w_j}^2 \\\ &= \sum \limits_{j=1}^T \left[ \sum \limits_{\mathbf{x}_i \in R_j} g(\mathbf{x}_i)w_j + \frac{1}{2} \left( \sum \limits_{\mathbf{x}_i \in R_j} h(\mathbf{x}_i) + \lambda \right) w_j^2 \right] + \gamma T \end{aligned}$$
We need to find $w_j$'s that need minimize this equation. Taking derivative with respect to $w_j$, we can find the optimum $w_j$:
$$w_j^* = - \frac{ \displaystyle{ \sum \limits_{\mathbf{x}_i \in R_j} g(\mathbf{x}_i) } }{ \displaystyle{ \sum \limits_{\mathbf{x}_i \in R_j} h(\mathbf{x}_i) + \lambda } } \tag{29}$$
Using these $w_j$'s, we can find the optimum cost value:
$$\mathcal{\tilde{L}}^{(m)^*} = -\frac{1}{2} \sum \limits_{j=1}^T \frac{ \displaystyle{ \left( \sum \limits_{\mathbf{x}_i \in R_j} g(\mathbf{x}_i) \right)^2 } }{ \displaystyle{ \sum \limits_{\mathbf{x}_i \in R_j} h(\mathbf{x}_i) + \lambda } } + \gamma T \tag{30}$$
We can use this equation as a scoring function when deciding on split criteria. As discussed in Decision Trees chapter, when we looking for the best split across all feature space, we choose the feature and the split point that gives the most reduction in our impurity. Likewise, XGBoost chooses the split crtierion that results in most reduction in the cost (28).
If a region $R$ is splitted into two regions $R_L$ and $R_R$, then the reduction in the cost after the split is given by:
$$\mathcal{\tilde{L}}^{(m)^*} = \frac{1}{2} \left[
\frac{
(
\sum \limits_{\mathbf{x}_i \in R_L}
g(\mathbf{x}_i)
)^2
}{
\sum \limits_{\mathbf{x}_i \in R_L} h(\mathbf{x}_i) + \lambda
} +
\frac{
(
\sum \limits_{\mathbf{x}_i \in R_R}
g(\mathbf{x}_i)
)^2
}{
\sum \limits_{\mathbf{x}_i \in R_R} h(\mathbf{x}_i) + \lambda
} -
\frac{
(
\sum \limits_{\mathbf{x}_i \in R}
g(\mathbf{x}_i)
)^2
}{
\sum \limits_{\mathbf{x}_i \in R} h(\mathbf{x}_i) + \lambda
}
\right] - \gamma \tag{31}$$
Split Finding
As we discussed in the previous chapter, split finding is arguably the most computationally expensive part of the Decision Tree algorithm. To find the best split for a specific node, we need to iterate over all features and sort their values, and search for the values that gives the best split according to some impurity measure like gini index, cross entropy or cost reduction like (31). This algorithm is called the Exact Greedy Algorithm. In settings where we have millions or billions of data points, this solution becomes infeasible.
Instead, XGBoost proposes several algorithms for avoiding the disadvantages of Exact Greedy Algorithm for split finding.
Approximate Algorithm
Exact Greedy algorithm needs to enumerate over all values of a feature in one step and it needs to repeat that for all features. To avoid the computational cost of this process, XGBoost proposes an algorithm called Approximate Algorithm. What it does is, instead of looking at every value of a feature, it finds $l$ percentile of a feature, based on its values in the training set. Then, it iterates over these $l$ different percentiles to find the best possible split amongst these percentiles, instead of looking at $N_k \approx N$ different values of a feature. As the Exact Greedy algorithm, Approximate Algorithm does this step for every features.
Sparsity-aware Split Finding
There can be a lot of sparse features in large data sets. This sparsity in the data slows down the split finding process. XGBoost proposes a Sparsity-aware Split Finding algorithm. It gives a default direction (left or right) to which a way the missing values in the feature to go while splitting the node. It finds the best direction from the data by looking at only the non-missing values and calculating the cost reduction in each direction.
There are also low level optimizations XGBoost performs that speeds up the tree learning process. Its paper explains them in detail.
